
ティーチングなし、事前計測なし。バリ取りや検査、塗装など多彩な作業に自動化の可能性。
株式会社チトセロボティクス(本社:東京都文京区、代表取締役社長:西田亮介)は、ロボット制御ソフトウェア「クルーボ」の機能を拡充する「デプスセンサユニット」を発売いたしました。デプスセンサとカメラを組み合わせることで、産業用ロボットアームのビジュアルフィードバック制御の対応範囲を拡大します。
■デプスセンサユニットについて
デプスセンサユニットを使用することで、産業用ロボットアームの先端でワークオブジェクトを精密になぞるトラッキング動作や、ばら積み状態からのピッキング作業など、奥行き情報を活用した自動化アプリケーションを、カメラ・センサのキャリブレーションの負担なく実装することができます。
想定用途
- ワイヤーハーネスの外観トラッキング検査
- 複雑形状の樹脂パーツバリ取り
- 多品種ワークの研磨、塗装
- 多様形状の溶接、墨入れ
デプスセンサユニットは、チトセロボティクスが提供する産業用ロボット制御ソフトウェア「クルーボ」に追加インストールして使えるソフトウェアです。ご購入時には、現場で使えるデプスセンサとサンプルプログラムが付属し、すぐに自動化アプリケーション制作にご活用いただけます。サンプルプログラムでは、次の動画にある「不定形ケーブルトラッキング動作」を実装することができます。
■不定形ケーブルトラッキング動作
ロボット制御ソフト「クルーボ」に「デプスセンサユニット」を追加インストールすることで、モデル化が困難な不定形ケーブルハーネスに対してビジュアルフィードバック制御によるトラッキングをご覧いただけます。
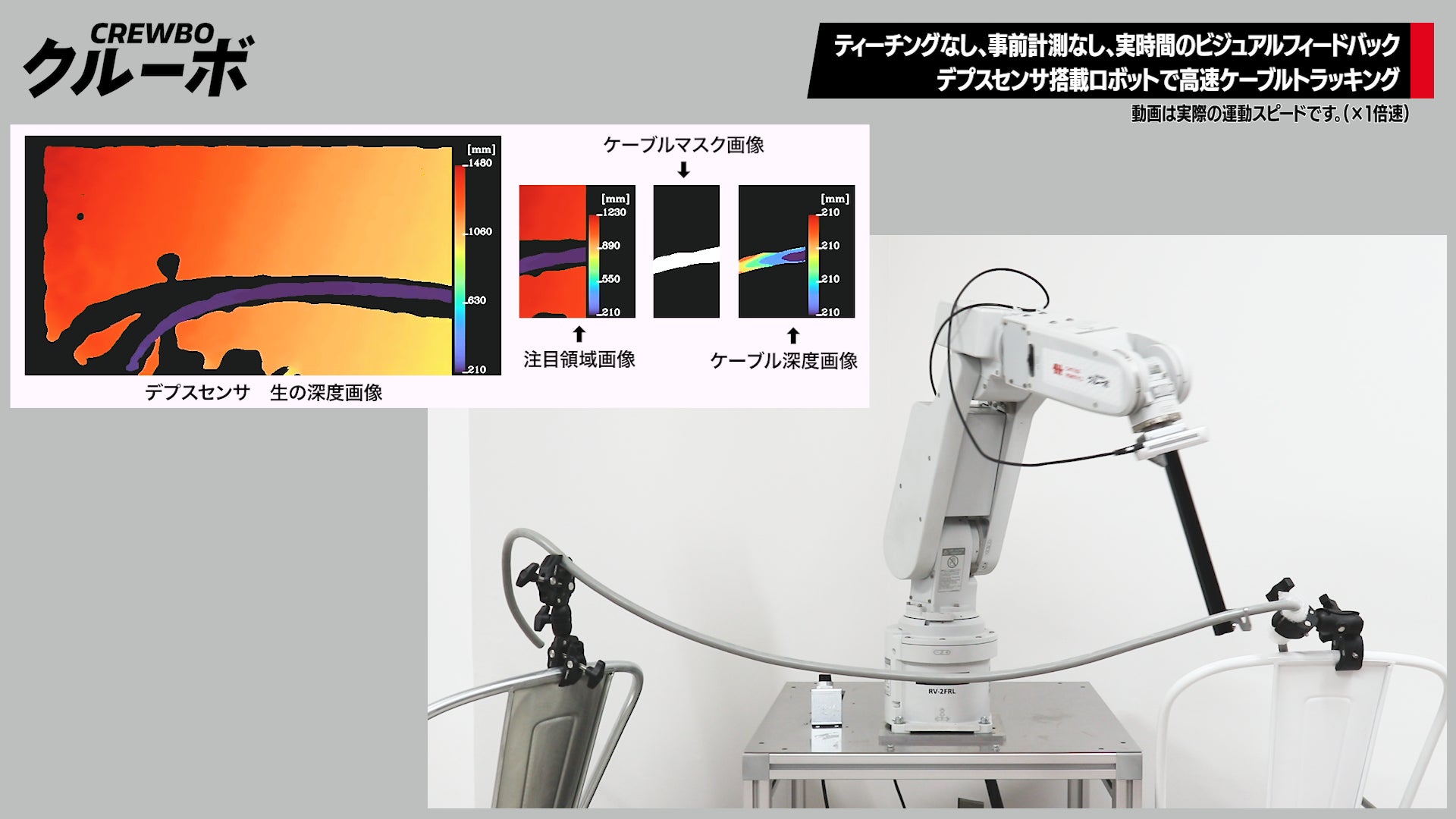
アンカー固定されていない産業用ロボットアームの先端に、デプスセンサ(デプスセンサユニットに付属します)を搭載したハンドアイ構成のシステムです。
事前のティーチングなしで、リアルタイムビジュアルフィードバック制御によって変化し続ける環境とワークオブジェクトに追従します。
ロボットの動作スピードが高速で、ターゲットトラッキングすることができます。
動画は実際の運動スピードです。(×1倍速)
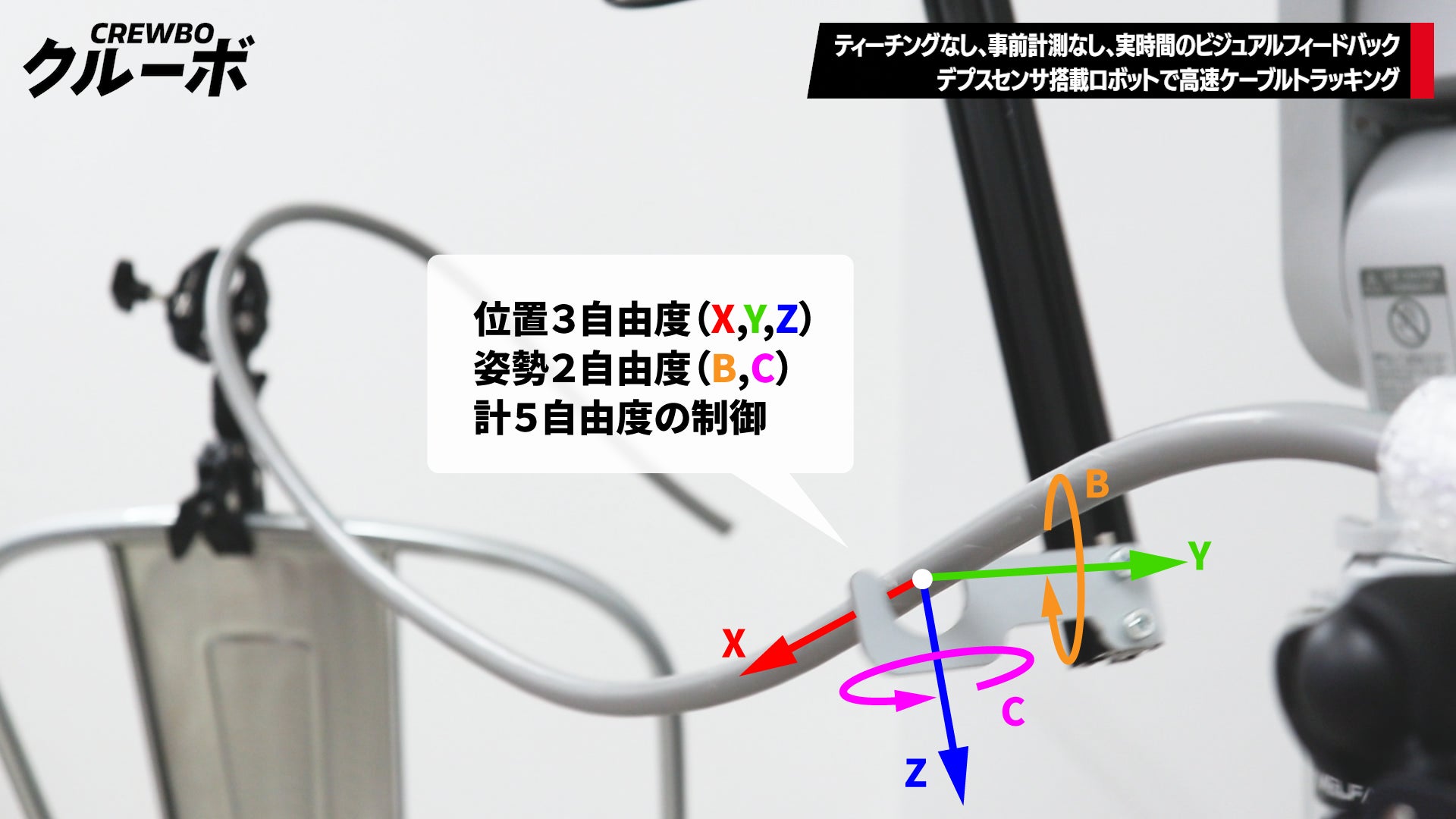
ロボットのアーム先端を延長した手先には、U字型のパーツが取り付けられており、このU字部分をロボット前面に垂れて吊り下げられたケーブルに沿わせてトラッキングを行います。
デプスセンサユニットで認識した画像からロボットの手先位置と手先姿勢をケーブルのしなりやうねりにあわせてロボットへの制御入力を行っています。
ハンドアイとして搭載されたデプスセンサは空間に浮き出たケーブルを深度情報(奥行き距離)によって背景と分離し、精緻な画像認識を実現しています。

動画の動作はロボットの決まった運動(教示再生)でないことを示すため、動画中盤では、ケーブルの片方を人間が持って自由に移動させることで、ロボットが追従していることをご確認いただけます。
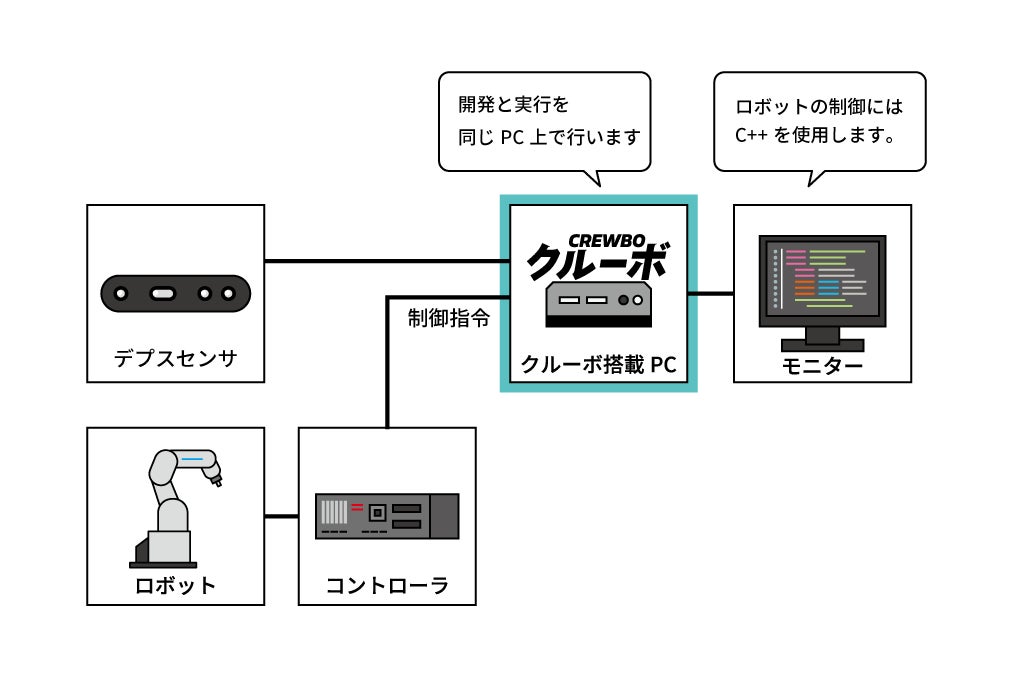
システム構成図
■クルーボについて
キャリブレーションの負担なしで、20μm精度の制御ができるロボットプログラミングソフトウェア
クルーボは簡単に、カメラを使った高精度なロボット制御ができるプログラミングソフトウェアです。チトセロボティクスが発明した「キャリブレーションの負担なしで、0.02mmの超高精度制御を実現するロボット技術」をご提供します。高度な画像認識と高速なロボット軌道制御が可能なコンピュータも付属し、必要なソフトウェアはすべてインストール済みなので、すぐにお使いいただけます。
