
クルーボの医療応用(大阪大学西川研究室との共同研究)
第1報ステレオ内視鏡を用いた腹腔鏡手術器具の三次元位置決めに成功
2024.02.21
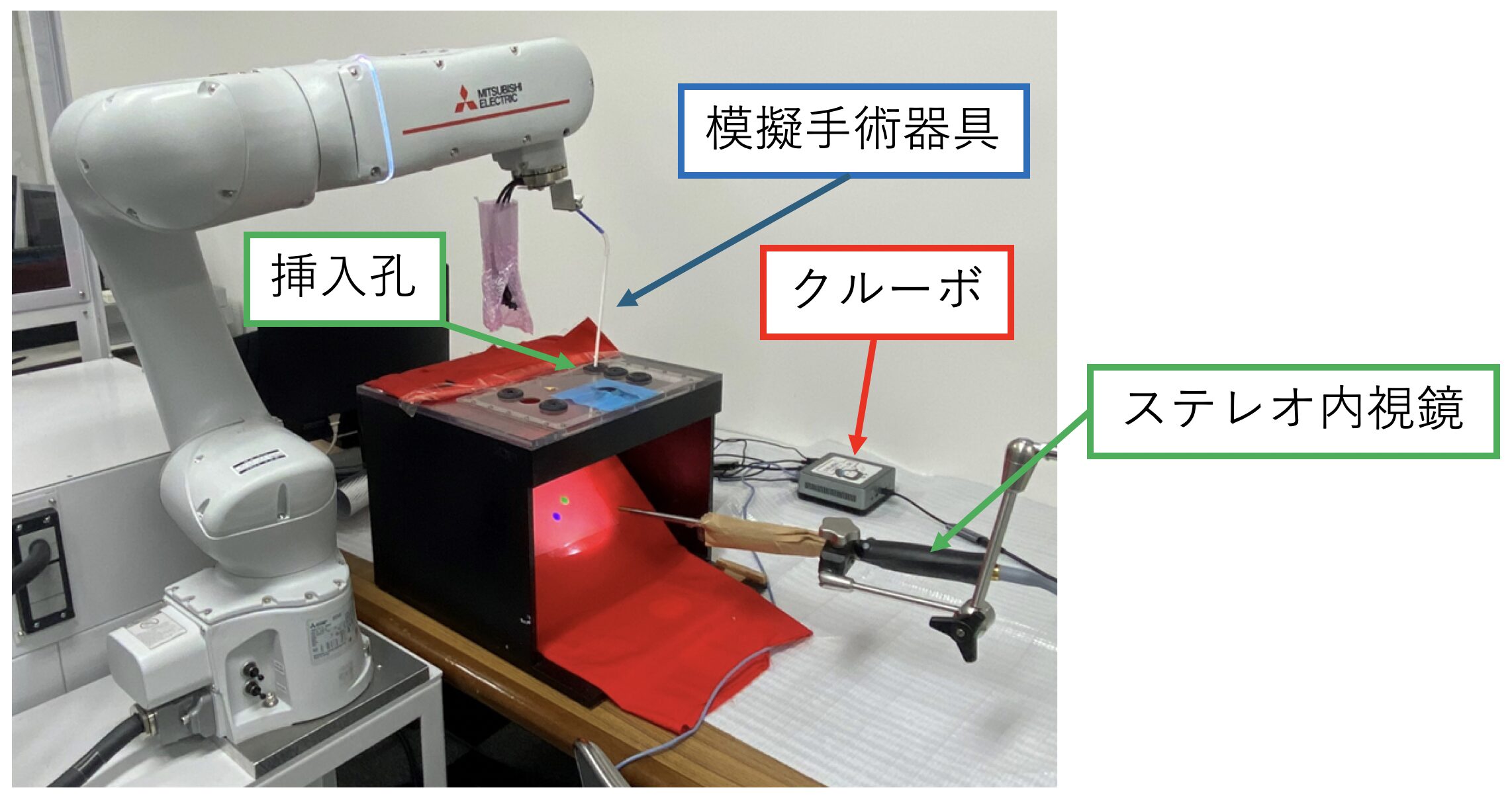
腹腔鏡手術を想定して実際に医療現場で使用されているステレオ内視鏡をクルーボに接続し、模擬手術器具を把持した産業用ロボットに挿入孔を通して器具先端を目標位置へ三次元的に位置決めさせるシステム構築に成功しました。
ステレオ内視鏡のカメラパラメータは一切未校正、手先と模擬手術器具の接続部にはやわらかく変形する部材が含まれておりその先端位置も不正確ですが、実用的な精度での手術器具の三次元位置決めに成功しています。
詳細は日本機械学会ロボティクス・メカトロニクス講演会2024で発表予定です。
ロボティクス・メカトロニクス講演会詳細
https://robomech.org/2024/